雷達(dá)測(cè)速系統(tǒng)解決方案
方案概述
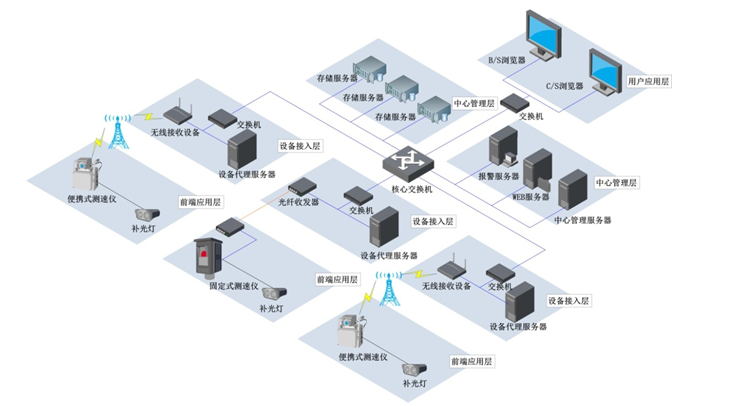
雷達(dá)測(cè)速抓拍系統(tǒng)主要由圖像采集子單元���、網(wǎng)絡(luò)傳輸子單元和中心管理子單元三部分��。前端圖像采集子單元主要由測(cè)速抓拍儀��、補(bǔ)光設(shè)備和輔助支撐設(shè)備組成���,測(cè)速抓拍儀分固定式和便攜式兩種安裝方式;網(wǎng)絡(luò)傳輸子單元主要由交換機(jī)����、光纖收發(fā)器或者無(wú)線路由器組成,完成數(shù)據(jù)的有線或無(wú)線傳輸���;中心管理子單元主要由中心管理軟件和硬件設(shè)備組成�����,完成數(shù)據(jù)的后期挖掘和應(yīng)用���。
解決方案
雷達(dá)所發(fā)射的高頻信號(hào)作用于移動(dòng)車輛時(shí),其反射頻率會(huì)有改變(多普勒效應(yīng)),這種多普勒頻移正比于移動(dòng)目標(biāo)的速度����,測(cè)速抓拍主機(jī)通過(guò)檢測(cè)所發(fā)頻率跟反射頻率的變化及時(shí)間�,并結(jié)合測(cè)速現(xiàn)場(chǎng)的車寬寬度、雷達(dá)與車道的安裝距離和安裝角度等����,計(jì)算移動(dòng)車輛的速度、距離和大小��。
系統(tǒng)集圖像采集�、數(shù)據(jù)處理、數(shù)據(jù)存儲(chǔ)和傳輸于一體�����,前端無(wú)需放置工控機(jī)���,機(jī)構(gòu)簡(jiǎn)單��、性能穩(wěn)定�,環(huán)境適應(yīng)性強(qiáng)���,它相比于工控機(jī)系統(tǒng)結(jié)構(gòu)更能滿足智能交通產(chǎn)品在室外全天候24小時(shí)不間斷的工作要求�。
方案特點(diǎn)
車牌識(shí)別功能
采用國(guó)內(nèi)領(lǐng)先的圖像識(shí)別算法,對(duì)所有通過(guò)車輛自動(dòng)進(jìn)行車輛號(hào)碼識(shí)別���、號(hào)碼顏色識(shí)別及車型自動(dòng)識(shí)別�。
車到識(shí)別功能
通過(guò)對(duì)雷達(dá)發(fā)射信號(hào)進(jìn)行調(diào)制��,接收信號(hào)進(jìn)行調(diào)解��,從而獲得車輛目標(biāo)的距離信息�,而由于安裝場(chǎng)景已經(jīng)提前設(shè)置,所以可以區(qū)分車輛坐落在哪個(gè)車道上���。
車型判定功能
采用高性能測(cè)速測(cè)距雷達(dá)���,可以在輸出車輛速度的同時(shí),同步輸出車輛目標(biāo)的距離��、車輛長(zhǎng)度�����,區(qū)分出車輛類型����。
雙快門專利技術(shù)
采用專門的雙快門技術(shù)�,抓拍和視頻采用獨(dú)立的圖像預(yù)處理技術(shù)�,可設(shè)置獨(dú)立的快門和增益,滿足視頻錄像和圖片效果的不同需求��,保證抓拍的圖像質(zhì)量和視頻效果達(dá)到優(yōu)秀����。